 |
Version 8.9.0
|

|
|
Version 8.9.0
|
|
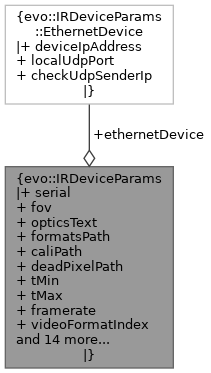
Structure containing device parameters. More...
#include <IRDeviceParams.h>
Classes | |
| struct | EthernetDevice |
Public Attributes | |
| unsigned long | serial |
| int | fov |
| Tchar * | opticsText |
| Tchar * | formatsPath |
| Tchar * | caliPath |
| Tchar * | deadPixelPath |
| int | tMin |
| int | tMax |
| float | framerate |
| int | videoFormatIndex |
| int | bispectral |
| int | autoFlag |
| float | minInterval |
| float | maxInterval |
| int | tChipMode |
| float | tChipFixedValue |
| float | focus |
| bool | enableExtendedTempRange |
| unsigned short | bufferQueueSize |
| bool | enableHighPrecision |
| int | radialDistortionCorrectionMode |
| int | deviceAPI |
| bool | useExternalProbeForReferencing |
| bool | enableMultiThreading |
| struct evo::IRDeviceParams::EthernetDevice | ethernetDevice |
Structure containing device parameters.
| int evo::IRDeviceParams::autoFlag |
Use auto flag procedure.
| int evo::IRDeviceParams::bispectral |
Use bi-spectral mode, if available (e.g. PI200).
| unsigned short evo::IRDeviceParams::bufferQueueSize |
internal buffer queue size
| Tchar* evo::IRDeviceParams::caliPath |
Path to calibration files
| Tchar* evo::IRDeviceParams::deadPixelPath |
Path to dead pixel files
| int evo::IRDeviceParams::deviceAPI |
0=Auto; 1= DirectShow (only Windows); 2= v4l (only Linux); 3= libusb (only Linux); 4= libuvc (only Linux, experimental, needs libuvc to be installed); 5= Ethernet
| bool evo::IRDeviceParams::enableExtendedTempRange |
False=Off, True=On; Caution! Enables invalid extended temp range
| bool evo::IRDeviceParams::enableHighPrecision |
False=Off, True=On; Enables temperatures with more than 1 decimal places. Depends on used camera (IRImager::getTemprangeDecimal()).
| bool evo::IRDeviceParams::enableMultiThreading |
If True process chain is split into two parallel threads (experimental)
| float evo::IRDeviceParams::focus |
position of focus motor in % of range [0; 100]
| Tchar* evo::IRDeviceParams::formatsPath |
Path to Format.def file
| int evo::IRDeviceParams::fov |
Field of view
| float evo::IRDeviceParams::framerate |
Frame rate
| float evo::IRDeviceParams::maxInterval |
Maximum interval for a flag cycle. It defines the time in which a flag cycle is forced at least once.
| float evo::IRDeviceParams::minInterval |
Minimum interval for a flag cycle. It defines the time in which a flag cycle is forced at most once.
| int evo::IRDeviceParams::radialDistortionCorrectionMode |
Distortion correction: 0=Off, 1=Normal, 2=Wide
| unsigned long evo::IRDeviceParams::serial |
serial number
| float evo::IRDeviceParams::tChipFixedValue |
Fixed value for tChipMode=2
| int evo::IRDeviceParams::tChipMode |
Chip heating: 0=Floating, 1=Auto, 2=Fixed value
| int evo::IRDeviceParams::tMax |
Maximum of temperature range
| int evo::IRDeviceParams::tMin |
Minimum of temperature range
| bool evo::IRDeviceParams::useExternalProbeForReferencing |
True=On Temperature values of external probe BR20AR are accessible on first analog input
| int evo::IRDeviceParams::videoFormatIndex |
Used video format index, if multiple modes are supported by the device, e.g. PI400 format index 0: 32 Hz, 1: 80 Hz.